移动高清盒子6PRO-中兴B860AV3.2-M_S905L3-B_4+32G刷Armbian_25.05.0使用记录
盒子信息
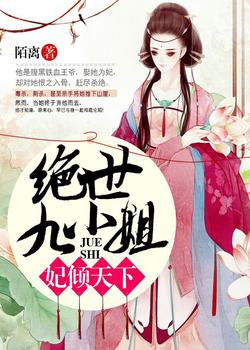
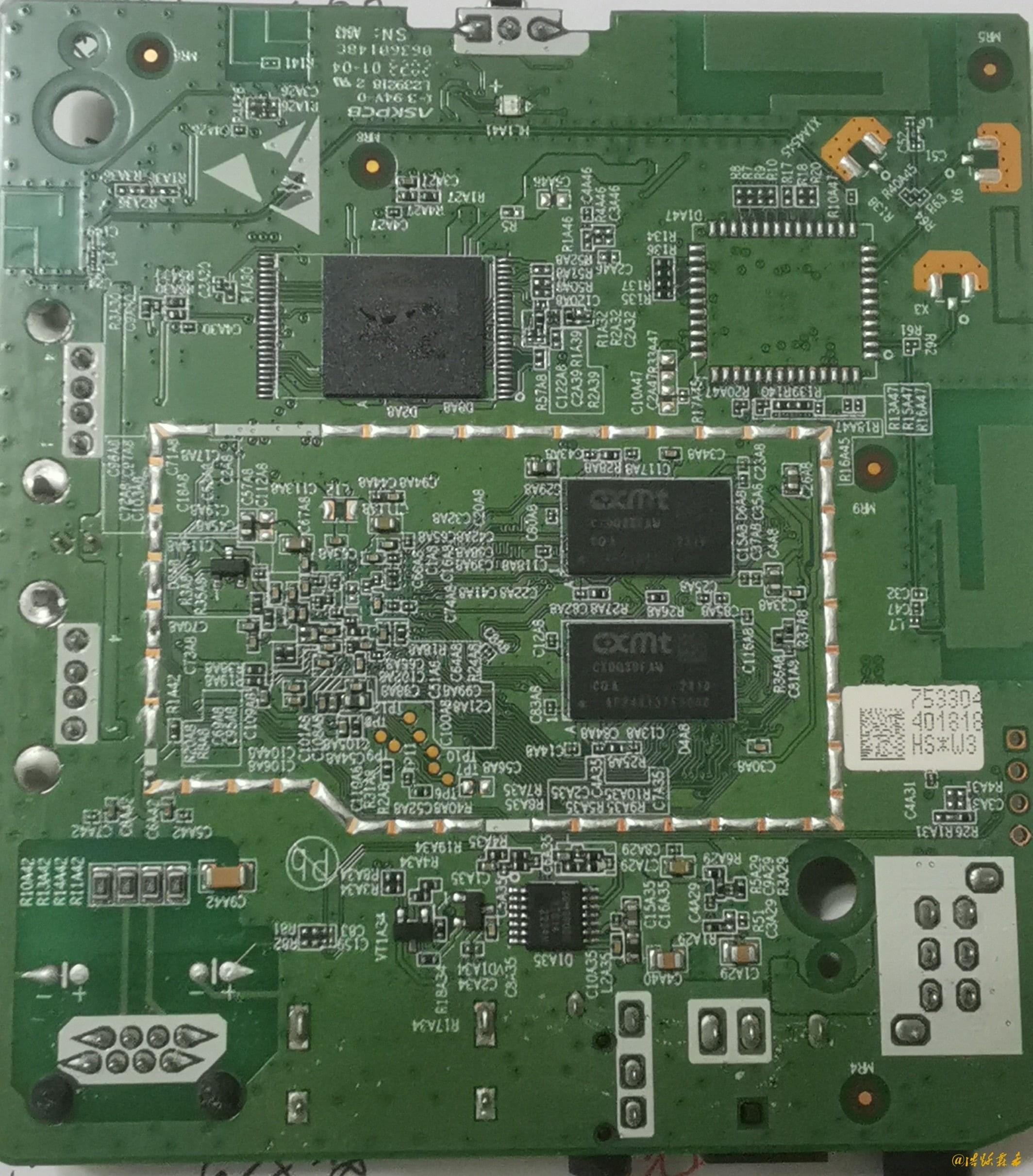
移动高清盒子 6PRO,其 CPU 芯片为晶晨 S905L3 - B,运存 4G,存储虽盒子背面标签标为 4G + 16G,但实际是 4G + 32G。


常用命令
系统更新:
sudo apt update && sudo apt full-upgrade -yArmbian上查看系统版本:
cat /etc/armbian-releaseapt命令 等同命令 命令解释 apt install apt-get install 安装软件包 apt remove apt-get remove 删除软件包 apt purge apt-get purge 删除软件包及其配置文件 apt update apt-get update 刷新索引目录 apt upgrade apt-get upgrade 升级本地可升级软件包 apt autoremove apt-get autoremove 自动删除不需要的依赖包 apt search apt-cache search 搜索应用 reboot 重启命令 apt自有命令 等同命令 apt list 列出所安装的所有包
重新安装armbian系统
系统写入U盘
买过来的时候已经安装好了armbian系统,但版本低了,我重新安装了一次,在网上购买了一个闪迪酷刃 16G U盘,使用balenaEtcher工具把:
Armbian_25.05.0_amlogic_s905l3-cm211_bookworm_6.12.27_server_2025.05.05.img
系统写入到U盘中。系统下载地址。Armbian 是基于 Debian 和 Ubuntu 的 Linux 发行版,专门为 ARM 开发板设计。Armbian 的版本命名通常遵循其基于的 Debian 或 Ubuntu 发行版。Armbian 的这四个版本(Noble、Jammy、Bullseye 和 Bookworm)分别基于不同的 Debian 或 Ubuntu 版本:版本说明:
- Armbian Noble - 这是基于 Ubuntu 22.04 LTS (代号 “Jammy Jellyfish”) 的版本。Ubuntu 22.04 是一个长期支持版本,提供了五年的安全更新和支持。Armbian 对这个版本进行了针对 ARM 设备的优化和定制。
- Armbian Jammy - 也是基于 Ubuntu 22.04 LTS 的版本。这个版本名可能与 Noble 重复或是对同一基础版本的另一种命名方式。
- Armbian Bullseye - 这是基于 Debian 11 (代号 “Bullseye”) 的版本。Debian 11 提供了多种软件的最新稳定版,并享有 Debian 社区的广泛支持和安全维护。Debian 版本的 Armbian 通常更倾向于稳定性和兼容性。
- Armbian Bookworm - 基于 Debian 12 (代号 “Bookworm”)。这是 Debian 的测试版本,在正式成为稳定版前,它会包含最新的软件更新。使用这个版本的 Armbian 可能提供一些最前沿的特性,但也可能不如稳定版那么稳定。
s905l3:芯片型号6.12.27:Linux 内核
机顶盒关机状态下插上U盘,然后开机,等待设备启动(在路由器里面可以看到新增的ip就表示已经开机成功)然后使用ssh工具连接上盒子账号root **初始密码为:**1234,进行如下相关设置:
- 创建root密码:随便填
- 选择默认系统命令shell: 2 zsh
- 创建新用户帐户: 随便填
- 设置新用户账户密码: 随便填
- 根据您的位置设置用户语言: 3 zh_CN.UTF-8
所有代码如下:
Welcome to Armbian OS! |
系统安装到机器闪存
然后在命令行输入armbian-install ,等待加载代码完成,选择M302A那一项的序号输入回车(我这里是127),文件格式选择ext4格式,也就是选1就可以,然后等待安装出现*[ SUCCESS ] Installation successful. Run [ poweroff ]*代码,表示安装成功,关闭电源,取下U盘,重启设备就可进入了。所有代码如下:
B860:~:# armbian-install |
换国内源
Debian全球镜像站列表:https://www.debian.org/mirror/list 。
修改/etc/apt/sources.list.d/ 路径下的armbian.sources文件内容如下:不要的可以自己注释掉。
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 |
修改/etc/apt/sources.list.d/ 路径下的debian.sources文件内容如下:不要的可以自己注释掉。
Types: deb |
更新包: 当完成以上所有操作后,你的Armbian就换成了清华源,但是还需要执行下面的命令使之生效:sudo apt-get update
这个命令会访问软件源列表里的每个网址,然后更新软件列表索引并保存在本地。如果在安装软件A的过程中用到了软件B,那么就会自动到软件列表里拉取。如果我们没有执行该命令,就可能会导致找不到相关的软件包而出错。所以在安装新的软件之前(宝塔、nginx、php、mysql等)都要先执行这个操作(不过也不用太频繁地执行该命令,一次安装多个软件,执行一次即可,太频繁了也没什么可以更新的)。执行完之后再装软件一般就不会报错了(当然,该出错的还是会错)。
然后再执行命令更新包:sudo apt update && apt upgrade。
[docker安装](Linux的 |Docker 文档)
官方说明:在 Debian 上安装 Docker 引擎_Docker中文网
第一次安装docker有问题,安装的是低版本的,现在升级安装:
更新包:
sudo apt update && sudo apt upgrade -y
sudo:以超级用户身份运行命令。
apt update:更新可用软件包的列表。
apt upgrade-y:升级所有已安装的软件包,并且-y选项允许自动确认对所有操作的确认提示。更新docker:
sudo apt install docker-ce docker-ce-cli containerd.io-y
apt install:安装并更新指定的软件包。
docker-ce:这是Docker社区版的安装包。
docker-ce-cli:用于与Docker守护进行交互的命令行工具。containerd.io:用于管理容器生命周期的进程。
-y:同样是自动确认对所有操作的确认提示。如果使用的是Docker的官方仓库,也就是说 上面不成功的话,执行下面命令移除
sudo apt-get remove docker docker-engine docker.io containerd runc然后重新安装docker:
sudo apt-get install docker-ce docker-ce-cli containerd.io验证docker版本信息:
docker --version
第二次安装
重装系统Armbian_25.11.0_amlogic_s905l3_bookworm_6.1.149_server_2025.09.01.img后以上代码安装docker没有安装成功。
更新系统:安装前更新软件包:
apt update && apt upgrade -y**安装依赖包:**安装必要的依赖,以支持 HTTPS 和其他工具:
apt install -y apt-transport-https ca-certificates curl gnupg lsb-release使用便捷脚本安装
Docker 官方提供了一个便捷脚本get-docker.sh,可自动检测系统并安装。我们使用阿里云镜像(–mirror Aliyun)来加速,避免访问国外源失败。下载脚本:
curl -fsSL https://get.docker.com -o get-docker.sh# 下载get-docker.sh并运行get-docker.sh
curl -fsSL https://get.docker.com -o get-docker.sh && sudo sh ./get-docker.sh如果 curl 失败,尝试 wget:
wget https://get.docker.com -O get-docker.sh
如果下载脚本出现以下问题:root@uefi-x86:~# curl -fsSL https://get.docker.com -o get-docker.sh
curl: (35) Recv failure: 连接被对方重置解决方法:
sudo apt-get update
sudo apt-get install ca-certificates curl
#sudo apt-get install --reinstall ca-certificates
sudo update-ca-certificates
# 等几秒后,再执行以下命令,会在root文件夹中下载一个get-docker.sh的文件
curl -fsSL https://get.docker.com -o get-docker.sh
# 再执行以下,就会安装docker
sh get-docker.sh --mirror Aliyun执行脚本,使用阿里云镜像:
sh get-docker.sh --mirror Aliyun
如果阿里云不可用,试用 AzureChinaCloud:sh get-docker.sh --mirror AzureChinaCloud脚本会自动添加存储库、安装 docker-ce、docker-ce-cli 和 containerd.io。
如果脚本失败,可手动配置国内镜像源(清华镜像站示例)
添加 GPG 密钥(使用国内镜像):
curl -fsSL https://mirrors.tuna.tsinghua.edu.cn/docker-ce/linux/debian/gpg | gpg --dearmor -o /etc/apt/keyrings/docker.gpg添加 GPG 密钥权限:
chmod a+r /etc/apt/keyrings/docker.gpg添加清华镜像存储库(替换 $(lsb_release -cs) 为您的代号,如 bookworm):
echo "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] https://mirrors.tuna.tsinghua.edu.cn/docker-ce/linux/debian $(lsb_release -cs) stable" > /etc/apt/sources.list.d/docker.list更新并安装:
apt update
apt install -y docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
配置 Docker 镜像加速器(国内镜像):
安装后,配置 Docker 使用国内镜像加速器,以加速拉取镜像(如从 Docker Hub 下载)。创建或编辑配置文件:
mkdir -p /etc/docker
nano /etc/docker/daemon.json添加以下内容(使用阿里云或网易云镜像):
{
"registry-mirrors": [
"https://registry.docker-cn.com",
"https://mirror.ccs.tencentyun.com",
"https://docker.mirrors.ustc.edu.cn",
"https://hub-mirror.c.163.com"
]
}保存并退出(Ctrl+O, Enter, Ctrl+X)。
重启 Docker服务:
systemctl daemon-reload |
步骤 4: (可选)安装 Docker Compose
Docker Compose 用于管理多容器应用,也可使用国内镜像下载。- 下载最新版本(检查 https://github.com/docker/compose/releases 获取最新版本,以 v2.39.2 为例):
curl -L "https://get.daocloud.io/docker/compose/releases/download/v2.29.2/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose
或使用 GitHub 国内加速:curl -L "https://github.com/docker/compose/releases/download/v2.39.2/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose
下载最新版本使用以下:
*curl -L https://github.com/docker/compose/releases/latest/download/docker-compose-$(uname -s)-$(uname -m) -o /usr/local/bin/docker-compose - 添加执行权限:
chmod +x /usr/local/bin/docker-compose - 验证安装,以下2种验证方式可以都试下:
docker-compose --version
安装方式分为两种,一种是独立安装,一种是插件安装。
独立安装的docker compose是通过docker-compose --version来执行的。
插件安装的docker compose是通过docker compose version来执行的。
- 下载最新版本(检查 https://github.com/docker/compose/releases 获取最新版本,以 v2.39.2 为例):
手动安装docker compose
离线安装:在 https://github.com/docker/compose/releases 下载 docker-compose,如下载2.32.4版本的docker compose, 下载地址链接为 https://github.com/docker/compose/releases/download/v2.32.4/docker-compose-linux-x86_64。将下载好的 docker-compose-linux-x86_64 文件拷贝到 /usr/local/bin/docker-compose 路径中,对路径添加可执行权限,执行:
chmod +x /usr/local/bin/docker-compose。如果安装后执行 docker-compose 失败,可以创建到路径链接到 /usr/bin 目录。sudo ln -s /usr/local/bin/docker-compose /usr/bin/docker-compose插件式安装docker compose:
sudo apt-get update
sudo apt-get install docker-compose-plugin插件安装另一种方法
# 下载插件
sudo curl -L "https://github.com/docker/compose/releases/latest/download/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose
# 增加权限 及建立软链接
sudo chmod +x /usr/local/bin/docker-compose && sudo ln -s /usr/local/bin/docker-compose /usr/bin/docker-compose
# 查看版本
docker-compose version
卸载 Docker(如果需要):
apt purge -y docker-ce docker-ce-cli containerd.io
rm -rf /var/lib/docker /etc/docker
rm /etc/apt/sources.list.d/docker.list
[离线安装docker](Docker&Docker Compose安装(离线+在线)-阿里云开发者社区)
Docker离线安装
下载想要安装的docker软件版本:https://download.docker.com/linux/static/stable/x86_64/如目标机无法从链接下载,可以在本机下载后 scp docker版本压缩包[如docker-20.10.9.tgz] username@host:port:yourpath
解压软件包:tar -xvzf docker-20.10.9.tgz
mv docker/* /usr/bin 【此处路径配置错会导致start docker.service失败】进入目录/etc/systemd/system/ ,创建并编辑文件 docker.service,填入以下内容:
[Unit]
Description=Docker Application Container Engine
Documentation=https://docs.docker.com
After=network-online.target firewalld.service
Wants=network-online.target
[Service]
Type=notify
ExecStart=/usr/bin/dockerd
ExecReload=/bin/kill -s HUP $MAINPID
LimitNOFILE=infinity
LimitNPROC=infinity
LimitCORE=infinity
TimeoutStartSec=0
Delegate=yes
KillMode=process
Restart=on-failure
StartLimitBurst=3
StartLimitInterval=60s
[Install]
WantedBy=multi-user.target关闭防火墙并启动docker,执行命令:
[root@localhost home]# systemctl stop firewalld
[root@localhost home]# systemctl daemon-reload
[root@localhost home]# systemctl start docker
[root@localhost home]# systemctl enable docker检查docker是否启动
docker version
挂载USB硬盘
在家里有一个闲置的闪迪256G的U盘想把它挂载到Armbian系统上。
手动挂载
插入U盘:将U盘插入系统。
查看设备:使用*
lsblk或fdisk -l或slblk -f*命令查看所有块设备、分区、U盘文件系统。lsblk创建挂载点:创建一个目录作为挂载点。
sudo mkdir -p /mnt/usb256查看u盘文件格式:
file -s /dev/sdb1# 查看u盘位置
B860:drpyS:# lsblk
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINTS
sda 8:0 1 233.1G 0 disk
└─sda1 8:1 1 233.1G 0 part /B860
sdb 8:16 1 28.9G 0 disk
└─sdb1 8:17 1 28.9G 0 part
mmcblk2 179:0 0 29.3G 0 disk
├─mmcblk2p1 179:1 0 511M 0 part /boot
└─mmcblk2p2 179:2 0 28.7G 0 part /var/log.hdd
/
mmcblk2boot0 179:32 0 4M 1 disk
mmcblk2boot1 179:64 0 4M 1 disk
zram0 254:0 0 1.4G 0 disk [SWAP]
zram1 254:1 0 50M 0 disk /var/log
zram2 254:2 0 0B 0 disk
# sdb1 对应上面的位置
B860:drpyS:# file -s /dev/sdb1
/dev/sdb1: Linux rev 1.0 ext4 filesystem data, UUID=a795e6fa-620a-7247-91b4-b234c62b11cc (extents) (large files) (huge files)挂载U盘:首先要将U盘格式化成vfat(fat32)的文件系统,然后使用*
mount*命令挂载U盘,并指定vfat文件系统类型和utf8字符集。mount -t ext4 /dev/sdb1 /aaa -o iocharset=utf8sudo mount -t vfat /dev/sdb1 /mnt/usb256 -o iocharset=utf8验证挂载:使用*
df -h*命令查看文件系统的挂载状态。df -h# 创建usb256挂载文件夹;-p 创建这个路径下的所有文件夹
B860:~:# mkdir -p /B860
B860:~:# lsblk
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINTS
sdb 8:16 1 233.1G 0 disk
└─sdb1 8:17 1 233.1G 0 part
mmcblk2 179:0 0 29.3G 0 disk
├─mmcblk2p1 179:1 0 511M 0 part /boot
└─mmcblk2p2 179:2 0 28.7G 0 part /var/log.hdd
/
mmcblk2boot0 179:32 0 4M 1 disk
mmcblk2boot1 179:64 0 4M 1 disk
zram0 254:0 0 1.4G 0 disk [SWAP]
zram1 254:1 0 50M 0 disk
zram2 254:2 0 0B 0 disk
# 查看U盘文件系统
B860:~:# lsblk -f
NAME FSTYPE FSVER LABEL UUID FSAVAIL FSUSE% MOUNTPOINTS
sdb
└─sdb1 vfat FAT32 5CE8-C209 232.7G 0% /mnt/usb256
mmcblk2
├─mmcblk2p1 vfat FAT32 BOOT_EMMC 3969-8A2B 366.4M 28% /boot
└─mmcblk2p2 ext4 1.0 ROOTFS_EMMC dd9bb55a-3bd3-4a1e-92d3-7e99036e58e4 25G 11% /var/log.hdd
/
mmcblk2boot0
mmcblk2boot1
zram0 swap 1 e1891492-ce46-46de-85a6-541e6dfa96fe [SWAP]
zram1
zram2
B860:~:# sudo mount -t vfat /dev/sda1 /B860 -o iocharset=utf8
B860:~:# df -h
文件系统 大小 已用 可用 已用% 挂载点
udev 1.3G 0 1.3G 0% /dev
tmpfs 281M 6.2M 274M 3% /run
/dev/mmcblk2p2 29G 3.1G 26G 11% /
tmpfs 1.4G 0 1.4G 0% /dev/shm
tmpfs 5.0M 0 5.0M 0% /run/lock
tmpfs 1.4G 12K 1.4G 1% /tmp
/dev/mmcblk2p1 510M 144M 367M 29% /boot
armbian-ramlog 50M 1.7M 49M 4% /var/log
overlay 29G 3.1G 26G 11% /var/lib/docker/overlay2/2d4a09433bbd03561edcfc1073c7297d22d472cc18670b763d7383586de5a15b/merged
tmpfs 281M 4.0K 280M 1% /run/user/0
/dev/sdb1 233G 12K 233G 1% /mnt/usb256 # 这是挂载的U盘
B860:~:#
自动挂载
编辑fstab文件:编辑*
/etc/fstab*文件,在文件末尾添加一行内容以实现自动挂载。sudo vim /etc/fstab添加挂载配置:
/dev/sda1 /B860 vfat auto,nofail,noatime,rw,users,iocharset=utf8 0 0/dev/sda1:这是一个设备文件,表示设备sda的第一个分区。在Linux中,磁盘设备通常被表示/dev/sdX,其中X是字母a、b、c等来标识不同的设备。数字1表示该设备的第一个分区。
/mnt/usb:文件系统将被挂载的目标目录。在这个命令中,文件系统将会被挂载到/mnt/usb目录上。vfat:文件系统类型,表示使用FAT文件系统。FAT是一种常用的文件系统格式,通常在可移动设备(如USB闪存驱动器)上使用。 查看文件系统类型的操作,请参照手动操作中的操作方法。auto:挂载选项,表示自动检测文件系统的类型。nofail:挂载选项,表示如果无法挂载文件系统,不会导致启动进程失败。这对于可选的文件系统非常有用,以防止系统启动过程因为无法挂载某些驱动器而失败。noatime:挂载选项,表示不记录文件的访问时间。这可以提高文件系统的性能。rw:挂载选项,表示将文件系统挂载为可读写模式。这意味着用户可以对文件系统进行读取和写入操作。**
users:**挂载选项,允许普通用户挂载和卸载文件系统。iocharset=utf8:挂载选项,表示使用UTF-8字符集处理文件名。[UTF-8是一种通用的字符编码,可以处理各种语言和字符。]**0:**文件系统的备份选项,用于确定何时需要对文件系统进行备份。0表示不进行备份。
**0:**文件系统的检测选项,用于确定在系统引导时是否对文件系统进行检测。0表示不进行检测。
如下代码:
UUID=dd9bb55a-3bd3-4a1e-92d3-7e99036e58e4 / ext4 defaults,noatime,nodiratime,commit=600,errors=remount-ro 0 1
LABEL=BOOT_EMMC /boot vfat defaults 0 2
tmpfs /tmp tmpfs defaults,nosuid 0 0
/dev/sda1 /mnt/usb256 vfat auto,nofail,noatime,rw,users,iocharset=utf8 0 0重启系统:重启后,U盘会自动挂载到*
/mnt/usb256*。*也可以在1Panel中打开
/etc/fstab*文件,然后输入以下内容,然后点击【确定】/dev/sda1 /B860 vfat auto,nofail,noatime,rw,users,iocharset=utf8 0 0
卸载U盘
- 在拔出U盘之前,最好将其卸载以确保数据安全。
sudo umount /mnt/usb256
- 在拔出U盘之前,最好将其卸载以确保数据安全。
安装和配置SMB
上面在Armbian上自动挂载了USB,下面就利用上面挂载的USB空间在Armbian上安装和配置SMB(Samba)来实现局域网内的文件共享。以下是详细的步骤:
安装SMB
首先,更新系统包:
sudo apt update然后,安装Samba:
sudo apt install samba
配置SMB
安装完成后,编辑Samba配置文件:
sudo nano /etc/samba/smb.conf
可以在*1Panel*面板左侧的系统下文件中打开/etc/samba/smb.conf在配置文件 *
Global Settings*下添加以下内容:[global]
workgroup = WORKGROUP
server string = %h server (Samba, Ubuntu)
security = user
log file = /var/log/samba/log.%m
max log size = 1000
syslog = 0
panic action = /usr/share/samba/panic-action %d
[usb256]
comment = usb256
path = /mnt/usb256
browsable = yes
read only = no
guest ok = yes
create mask = 0755
directory mask = 0755保存并退出编辑器。
创建共享目录并设置权限
创建共享目录:
sudo mkdir -p /mnt/usb256**创建用户并设置SMB密码:*为了安全地访问 Samba 共享,你需要创建一个 Samba 用户并设置密码。使用以下命令创建用户:
useradd -M -s /usr/sbin/nologin smbroot*
使用以下命令设置密码:smbpasswd -a smbroot
(smbroot是你创建的 Samba 用户名,可以根据你的喜好进行修改。-M不创建用户的 home 目录,-s /usr/sbin/nologin不允许用户登录系统。)使用root用户登录SMB:
chown root:root /mnt/usb256
touch /etc/samba/smbpasswd
# 创建root用户登录密码
smbpasswd -a root设置目录权限:
sudo chmod 755 /mnt/usb256g
启动和启用SMB服务
- 启动SMB服务:
sudo systemctl start smbd - 设置开机自启:
sudo systemctl enable smbd - 启动NMBD服务:
sudo systemctl start nmbd - 设置开机自启:
sudo systemctl enable nmbd
- 启动SMB服务:
防火墙设置
如果有防火墙,需要开放端口:
sudo ufw allow 139/tcp
sudo ufw allow 445/tcp验证服务状态
- 验证SMBD服务状态:
sudo systemctl status smbd - 验证NMBD服务状态:
sudo systemctl status nmbd
# 以上所有代码示例:
B860:~:# apt install samba
正在读取软件包列表... 完成
解压缩后会消耗 90.0 MB 的额外空间。
您希望继续执行吗? [Y/n] y
获取:1 https://mirrors.tuna.tsinghua.edu.cn/debian trixie/main arm64 libjemalloc2 arm64 5.3.0-3 [216 kB]
..
正在处理用于 libc-bin (2.41-12) 的触发器 ...
B860:~:# chown root:root /mnt/usb256
B860:~:# touch /etc/samba/smbpasswd
B860:~:# smbpasswd -a root
New SMB password:
Retype new SMB password:
Added user root.
B860:~:# chmod 0755 /mnt/usb256
B860:~:# sudo systemctl start smbd
B860:~:# sudo systemctl enable smbd
Synchronizing state of smbd.service with SysV service script with /usr/lib/systemd/systemd-sysv-install.
Executing: /usr/lib/systemd/systemd-sysv-install enable smbd
B860:~:# sudo systemctl start nmbd
B860:~:# sudo systemctl enable nmbd
Synchronizing state of nmbd.service with SysV service script with /usr/lib/systemd/systemd-sysv-install.
Executing: /usr/lib/systemd/systemd-sysv-install enable nmbd
B860:~:# sudo systemctl status smbd
● smbd.service - Samba SMB Daemon
Loaded: loaded (/usr/lib/systemd/system/smbd.service; enabled; preset: enabled)
Active: active (running) since Thu 2025-09-18 14:52:25 CST; 11min ago
Invocation: 72c0e43797294664add64910a9d43d71
Docs: man:smbd(8)
man:samba(7)
man:smb.conf(5)
Main PID: 3638 (smbd)
Status: "smbd: ready to serve connections..."
Tasks: 3 (limit: 3035)
Memory: 9.1M (peak: 9.4M)
CPU: 991ms
CGroup: /system.slice/smbd.service
├─3638 /usr/sbin/smbd --foreground --no-process-group
├─3641 "smbd: notifyd" .
└─3642 "smbd: cleanupd "
9月 18 14:52:24 B860 systemd[1]: Starting smbd.service - Samba SMB Daemon...
9月 18 14:52:25 B860 systemd[1]: Started smbd.service - Samba SMB Daemon.
B860:~:#- 验证SMBD服务状态:
连接到SMB共享
- 手机端
使用ES文件浏览器,扫描局域网设备,找到共享文件夹并输入root账户和密码即可访问。 - Windows端
在文件资源管理器中输入:\\<IP地址>
输入账户和密码后即可访问共享文件夹。通过以上步骤,您可以在Armbian上成功安装和配置SMB,实现Linux和Windows之间的文件共享 - samba参数配置教程(samba配置参数讲解)(/etc/samba/smb.conf )-CSDN博客
- 手机端
安装DDNS-GO(以转为lucky)
设置端口转发
不同的路由器端口转发所在的地方不一样,自己在路由器中去。新建端口转发需要填写以下几个项目(不同路由器的设置项名称不同,请灵活应变):
- 服务名称:这个只是方便自己区分和记忆,根据自己的需要填写,比如:玩客云SSH。
- 来源 IP:指的是可连接到内网的外网设备IP,默认空,即任意IP都可访问。
- 通信端口(外部端口)(范围):即通过公网IP访问内网设备时输入的端口,根据需要自己填写即可,比如填写6789。通信端口范围,在起始端口和结束端口间使用冒号“:”,如: 300:350。单独的端口间使用逗号“,”,如:566,789。
- 本地IP:即内网设备的IP地址,填你的Armbian设备的IP地址。
- 本地端口:Armbian设备上的服务所用到的端口,比如SSH的22端口。
- 通信协议:可选TCP/UDP/其他/全选,如果你不知道,推荐全选。
比如,我想在外部网络通过789端口连接内网IP为192.168.1.5的Armbian的SSH,即22端口(使用其他端口的服务同理),则上述的设置如下:
| 服务名称 | Armbian SSH |
|---|---|
| 源IP | 不填 |
| 通信端口(范围) | 6789 |
| 本地IP | 192.168.1.5 |
| 本地端口 | 22 |
| 通信协议 | 全选 |
那么在手机(通过数据流量连接互联网)上通过Juice SSH连接家里的Armbian设备时,只要输入:
公网IP:6789
这就等效于在局域网内输入:
192.168.1.5:22
如果你能在外部网络通过你的公网IP和你自己设置的6789端口成功连接SSH的话,证明你的端口转发设置是正确的,可以继续进行下一步了。如果你只想通过IP访问内网的设备和服务,到这一步就OK了。
部署并配置DDNS-GO
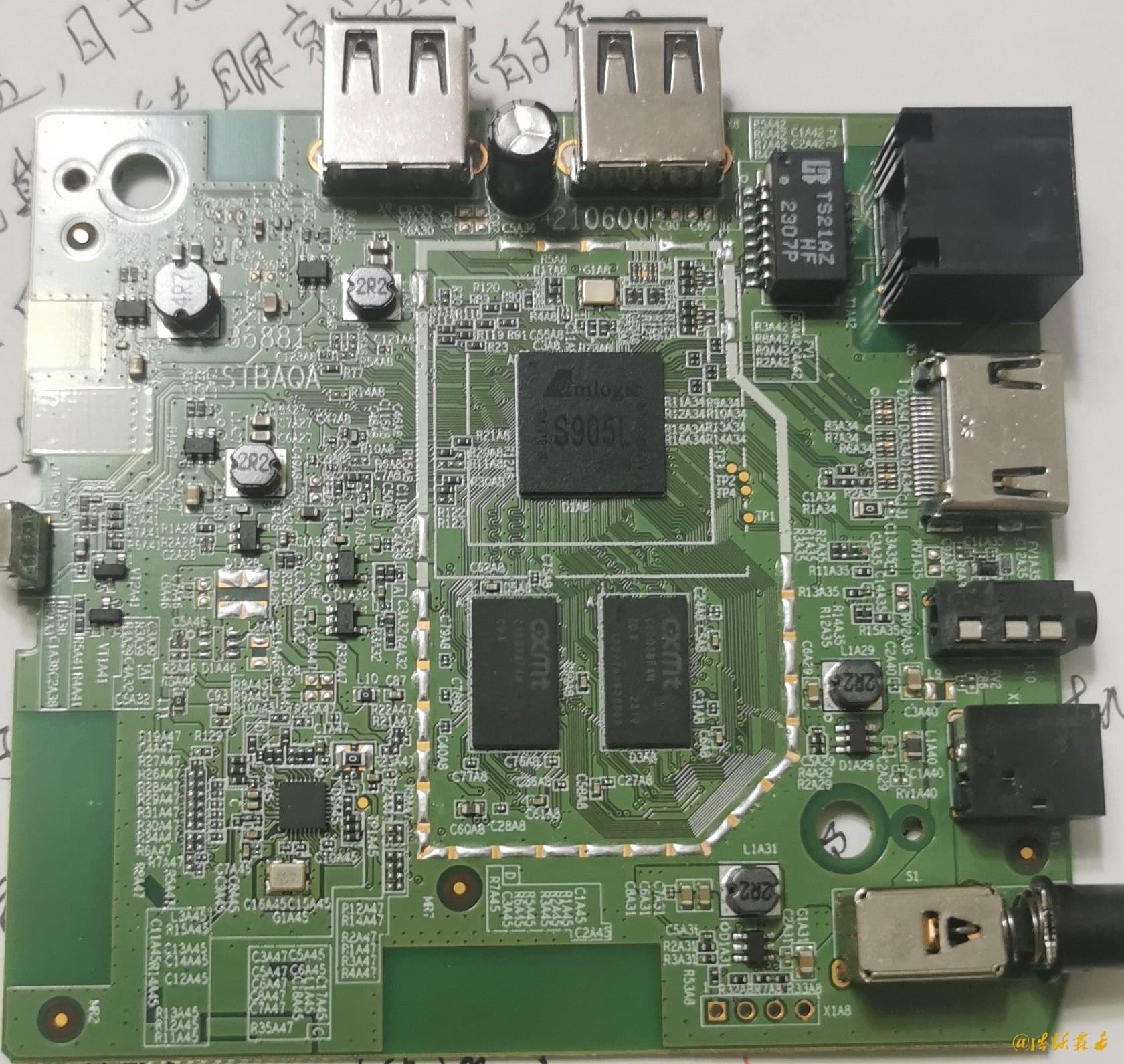
首先到github下载DDNS-GO,下载地址: 打开下载地址后,根据自己的系统选择对应的版本下载,对应关系如下图:
如果你的Armbian设备是64位的,如N1、R3300-L、我家云等就选arm64,如果是玩客云这样的32位设备就选armv6。将ddns-go这一个文件解压后,将
ddns-go这个文件,上传至Armbian设备里的任意文件夹。打开终端,输入下面的命令,赋予ddns-go执行权:
chmod +x ddns-go然后输入下面的命令安装ddns-go:
./ddns-go -s install -l :9876
# 如果不是root用户要在前面加sudo即
sudo ./ddns-go -s install -l :9876更多命令参数见帮助:
root@uefi-x86:/mnt/ddns-go# ./ddns-go -h
Usage of ./ddns-go:
-c string # 自定义配置文件路径 (default "/root/.ddns_go_config.yaml")
-cacheTimes int # 间隔N次与服务商比对 (default 5)
-dns string # 自定义 DNS 服务器(例如 8.8.8.8)
-f int # 同步间隔时间(秒) (default 300)
-l string # 监听地址 (default ":9876")
-noweb # 不启动 web 服务
-resetPassword string # 重设密码
-s string # 服务管理, 支持install, uninstall
-skipVerify # 跳过验证证书, 适合不能升级的老系统
-u # 更新 ddns-go
-v # ddns-go 版本直接在终端命令下载安装方法:
- 在系统里创建安装目录:
mkdir -p /你的目录/ddns-go - 进目录 :
cd /你的目录/ddns-go - 下载 :
wget https://github.com/jeessy2/ddns-go/releases/download/v6.9.2/ddns-go_6.9.2_linux_x86_64.tar.gz
- 解压:
tar -zxvf ddns-go_5.3.7_linux_armv7.tar.gz - 解压以后得到的ddns-go默认就有执行权限,所以直接./ddns-go就可以跑起来了。
- 在系统里创建安装目录:
添加动态域名解析
当启动ddns-go服务后,默认的端口是9876,当然,看具体的命令的端口参数。这个时候访问服务器的这个端口就可以进入配置的页面进行配置。
这里直接选择DNS服务商阿里云,然后点击创建AccessKey就进入到了阿里云的创建密钥的页面,自定登录创建即可,然后输入到页面的输入框中就行。
添加IPv4域名解析 和 添加IPv6域名解析 2个只要开启一个就可以了。
Domains:这里填写时一行一个域名,行尾用 ;。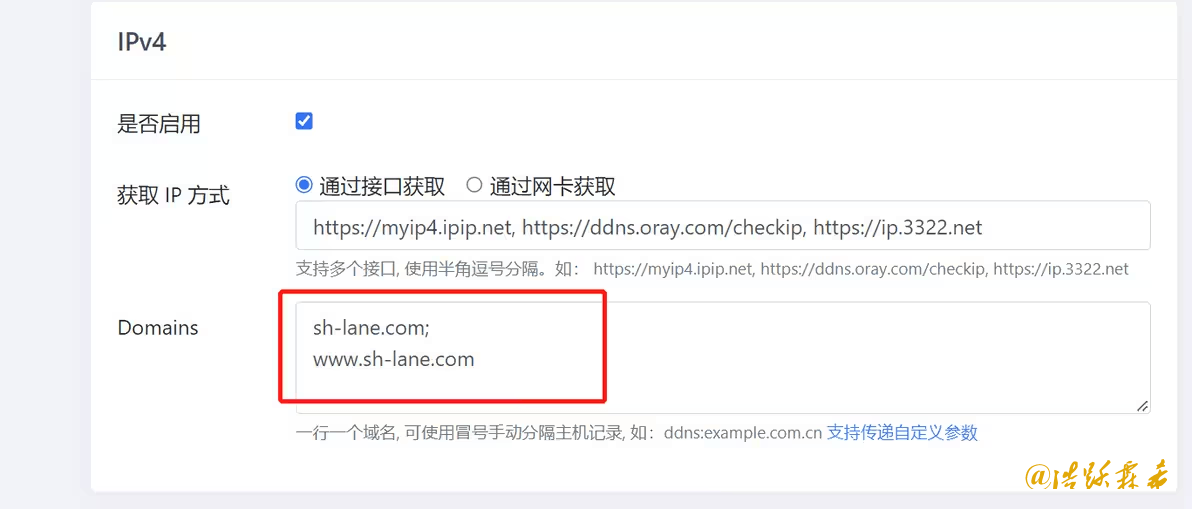
如果解析成功,会在阿里云解析中添加一条解析记录,可以去看一下。
检查本地是否支持IPv6很简单,只需要访问IPv6的检查网站就能知道,本地支持IPv6的返回如下: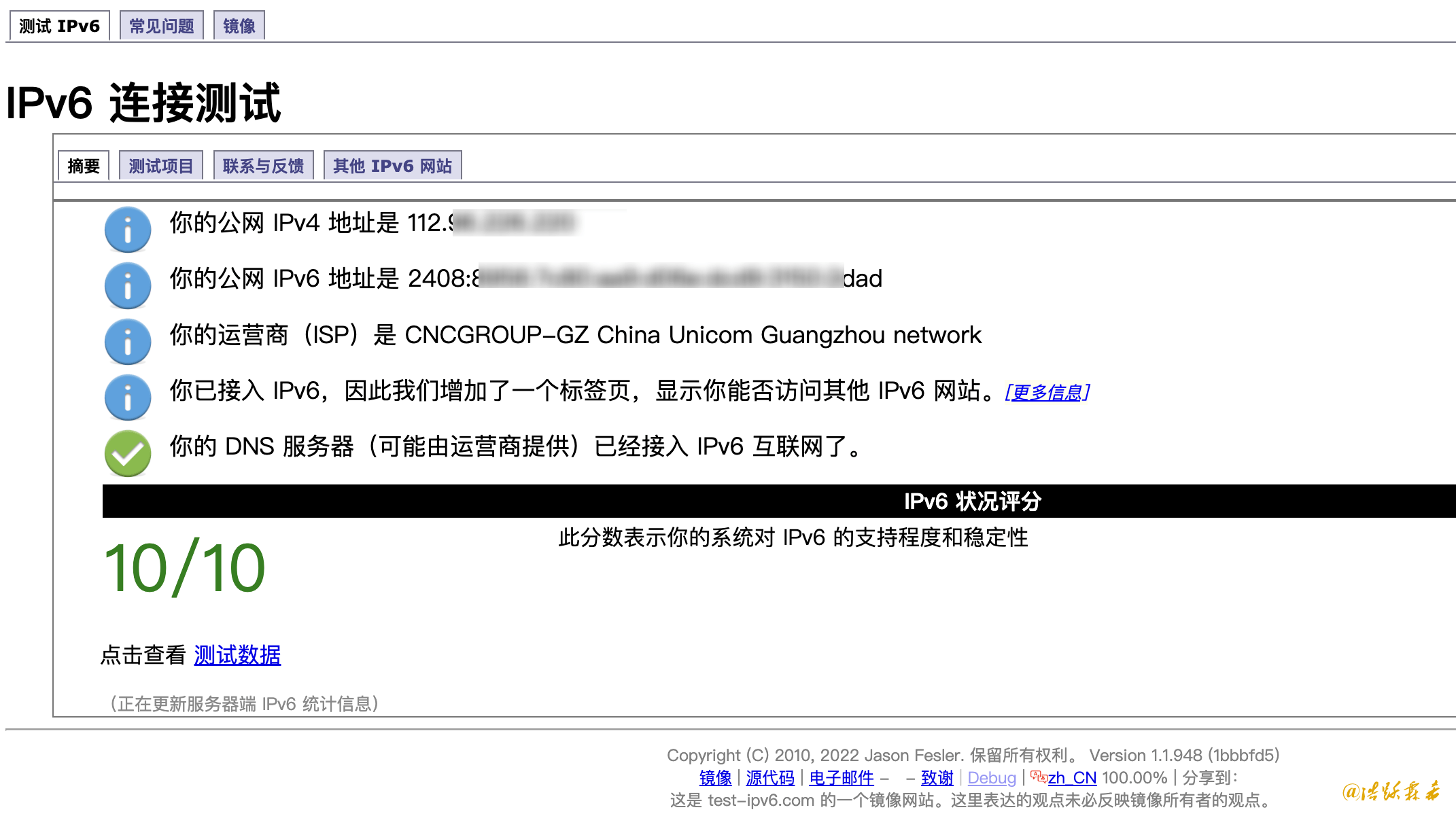
后续维护
如果是要修改配置信息,比如新增域名、供应商等,可以直接登录页面修改,也可以直接修改配置文件 /root/.ddns_go_config.yaml,改完需要重启服务
如果是想要改监听端口,则需要修改服务配置 /etc/systemd/system/ddns-go.service 然后执行重新加载服务配置文件,并重启服务。
卸载ddns-go
先停止服务:
sudo systemctl stop ddns-go查看ddns-go状态:
sudo systemctl status ddns-go卸载ddns-go:
sudo ./ddns-go -s uninstall
先要cd 到ddns-go的目录。jin:~:# cd /mnt/ddns-go
jin:ddns-go:# sudo ./ddns-go -s uninstall
2025/05/23 17:36:42 ddns-go service uninstalled successfully
安装 v2rayA
armbina安装V2raya方法与配置指南
安装rtl8188Gu 无线网卡
- 更新您的系统:
apt-get update && apt-get upgrade - 安装 armbian 固件:
sudo apt-get install armbian-firmware-full - 列出 USB 设备,可以在“CD ROM 模式”下看到 realtek 设备 :
lsusb - 使用 usb-modeswitch 修复:
sudo apt-get install usb-modeswitch - 最后,执行此命令:
sudo usb_modeswitch -KW -v 0bda -p 1a2b - 连接wifi:
nmtui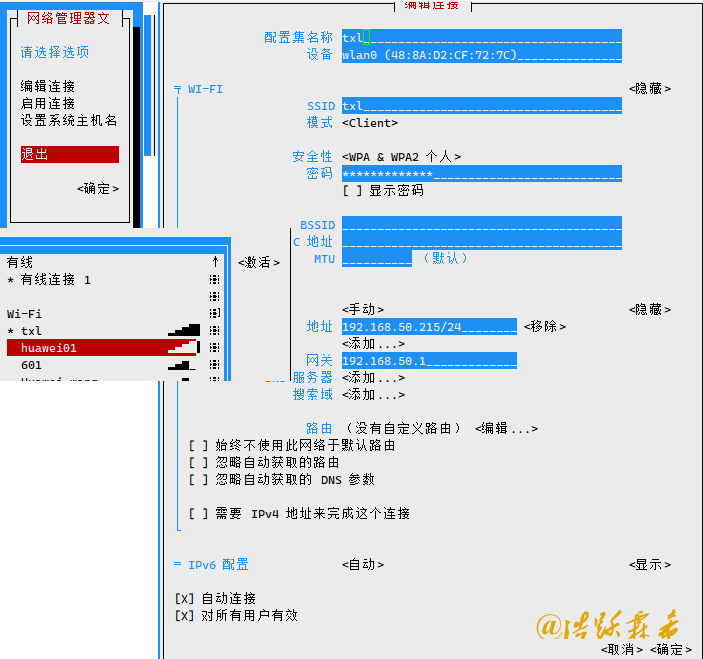
- 打开启动连接以后,在wi-fi中选择好热点以后以,要在右边点击激活,网络地址最好是用静态地址,就是手动自己指定好IP地址。
/usr/lib/modules/6.12.27-ophub/kernel/drivers/net/wireless/realtek/
/usr/lib/modules/6.12.41-current-x86/kernel/drivers/net/wireless/realtek/
安装lucky
删除lucky
查看Docker要删除的镜像:
docker imagesroot@uefi-x86:~# docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ghcr.io/home-assistant/amd64-hassio-supervisor latest 84818c1ac81d 9 days ago 405MB
gdy666/lucky latest 551cb65ea006 13 days ago 20.5MB查看Docker运行中的容器
docker psroot@uefi-x86:~# docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
6d109969133d gdy666/lucky "/app/lucky -c /good…" 26 hours ago Up 20 minutes lucky
47eb9c33ac7c ghcr.io/home-assistant/amd64-hassio-observer:2025.02.0 "/usr/bin/observer" 29 hours ago Up 30 minutes 0.0.0.0:4357->80/tcp, [::]:4357->80/tcp hassio_observer
16c1a158ebde hslr/sun-panel:latest "/bin/sh -c ./sun-pa…" 29 hours ago Up 30 minutes 0.0.0.0:3002->3002/tcp, [::]:3002->3002/tcp sun-panel
a2a8c2594fb1 ghcr.io/home-assistant/amd64-hassio-supervisor:latest "/init" 29 hours ago Up 30 minutes hassio_supervisor先停止
lucky容器(6d1)运行。只取“IMAGE ID”的前3个字符即可。docker stop 6d1root@uefi-x86:~# docker stop 6d1
6d1删除 lucky容器(6d1) :
docker rm f66再查看Docker所有容器的状态,看看还在不在:
docker ps -a删除镜像(551):
docker rmi 551root@uefi-x86:~# docker rmi 551
Untagged: gdy666/lucky:latest
Untagged: gdy666/lucky@sha256:8d7976c896ac52ccfc23dbcf886cb326ed8c440205be26551f7156aa0d9a4981
Deleted: sha256:551cb65ea00623d2a0132a42842f3f1cde291a65c3ef0c6ab854e1590b4e381a
Deleted: sha256:ce8247d51b1a7d816dd01e8691c223cba311ef6c182eda21a858db63563d6274
Deleted: sha256:4e54858818362e006609308f525549409e03116821b7137f655e2c8f7845a5b5
Deleted: sha256:079e6769945c86be6f7ac7cd5931a753b2727bc60207debc76673dde1fe75dd6
二进制安装lucky
[官方安装教程](安装运行&升级备份 | Lucky)。自动安装脚本:
在*/mnt下创建一个名为【lucky】的文件夹: mkdir /mnt/lucky*
URL="http://release.66666.host"; curl -o /tmp/install.sh "$URL/install.sh" && sh /tmp/install.sh "$URL" |
安装信息显示:
|
安装完成之后的端口:16601。
Bitwarden 密码管理器安装
直接在1Panel面板的应用商店里搜索安装即可,第一次使用要注册一个账号。在浏览器插件里搜索 Bitwarden 安装插件。导入 Edge浏览器的密码时,文件格式那里选择LastPass ,具体用法自行体验。须注意:必须要使用https,要使用反代网页才能完全打开。
Edge浏览器密码导出:


alist安装
新建目录:
mkdir -p /你的路径/alist/data在alist目录下,编写docker-compose.yml文件,内容:
version: '3.3'
services:
alist:
image: 'xhofe/alist:beta' # 镜像名
container_name: alist
volumes:
- '$PWD/data:/mnt/alist/data' # 数据持久化目录
ports:
- '5244:5244' # 默认Web端口
environment: #环境变量
- PUID=0 # 运行身份 UID
- PGID=0 # 运行身份 GID
- UMASK=022
- TZ=Asia/Shanghai # 时区设置
restart: unless-stopped启动容器,在docker-compose.yml文件所在目录下执行:
docker-compose up -d实时查看日志:
docker-compose logs -f第一次要设置一个密码:
docker exec -it alist ./alist admin set NEW_PASSWORDNEW_PASSWORD代表密码使用docker-compose 更新:
docker-compose pull,docker-compose up -d,使用其中一个。挂载smb
将路由器上的usb硬盘挂载到alist上。
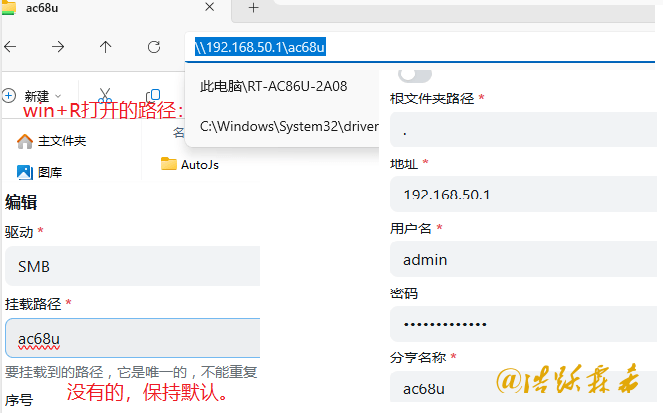
进入到alist的管理页,【存储】-》【添加】,在打开的网页中,驱动选择smb,挂载路径可以随便填个名字,也可以和你要挂载的那个文件夹同名,我这里填的是ac68u,下面的地址填挂载usb硬盘的那个路由器的地址,我这里是192.168.50.1,用户名和密码填你访问硬盘时的用户名和密码。
可以按
win+R在打开里填上\\192.168.50.1连接试下,看能不能连接上网络上的共享硬盘,如果你以前连接的时候,输入过用户名和密码,那么这次就不会要你输入了。分享名称是你要分享的文件夹的名称ac68u,最后点击【添加】
视频教程
安装cifs-utifs
安装cifs-utifs主要是为了挂载主路由上的共享文件夹,因为我在主路由的usb接口上插了一个硬盘。
安装:
sudo apt install cifs-utilsjin:~:# apt-get install cifs-utils
下列软件包是自动安装的并且现在不需要了:
tini
使用'apt autoremove'来卸载它(它们)。
将会同时安装下列软件:
libtalloc2 libwbclient0
建议安装:
smbclient winbind
下列【新】软件包将被安装:
cifs-utils libtalloc2 libwbclient0
升级了 0 个软件包,新安装了 3 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。
需要下载 169 kB 的归档。
解压缩后会消耗 904 kB 的额外空间。
您希望继续执行吗? [Y/n] y
获取:1 https://mirrors.tuna.tsinghua.edu.cn/debian bookworm/main arm64 libtalloc2
正在设置 cifs-utils (2:7.0-2) ...
update-alternatives: 使用 /usr/lib/aarch64-linux-gnu/cifs-utils/idmapwb.so 来在自动模式中提供 /etc/cifs-utils/idmap-plugin (idmap-plugin)
正在处理用于 libc-bin (2.36-9+deb12u10) 的触发器 ...
正在处理用于 man-db (2.11.2-2) 的触发器 ...
jin:~:#安装查看smb文件的包:
sudo apt install smbclientjin:~:# apt install smbclient
下列软件包是自动安装的并且现在不需要了:
tini
使用'apt autoremove'来卸载它(它们)。
将会同时安装下列软件:
libarchive13 libavahi-client3 libavahi-common-data libavahi-common3 libldb2 liblmdb0
libsmbclient libtdb1 libtevent0 samba-common samba-libs
建议安装:
lrzip heimdal-clients
推荐安装:
samba-common-bin
下列【新】软件包将被安装:
libarchive13 libavahi-client3 libavahi-common-data libavahi-common3 libldb2 liblmdb0
libsmbclient libtdb1 libtevent0 samba-common samba-libs smbclient
升级了 0 个软件包,新安装了 12 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。
需要下载 6,650 kB 的归档。
解压缩后会消耗 36.7 MB 的额外空间。
您希望继续执行吗? [Y/n] y
获取:1 https://mirrors.tuna.tsinghua.edu.cn/debian bookworm/main arm64 libarchive13 arm64 3.6.2-1+deb12u2 [316 kB]
正在处理用于 libc-bin (2.36-9+deb12u10) 的触发器 ...
jin:~:#查看共享目录:
# smbclient -L ${ip_addr} -U ${username}%${password}
smbclient -L 192.168.50.1 -U admin%jw123456查看时注意目录层次:是否存在sda、sdb
jin:~:# smbclient -L 192.168.50.1 -U admin%jw123456
Sharename Type Comment
--------- ---- -------
AC68U Disk External USB3.0's AC68U
IPC$ IPC IPC Service (RT-AC86U)
SMB1 disabled -- no workgroup available
jin:~:#挂载测试:
# 填写账号密码,远程目录必须正确,本地目录要存在,/mnt/ac68u是要挂载到armbian上面的目录,这个目录必需要存在,挂载以后以utf8的编码显示,要不挂载以后中文显示不出来,vers是smaba版本
mount -t cifs -v "//192.168.50.1/ac68u" "/mnt/ac68u" -o username="admin",password="jw123456",iocharset=utf8,vers=2.0jin:~:# mount -t cifs -v "//192.168.50.1/ac68u" "/mnt/ac68u" -o username="admin",password="jw123456",iocharset=utf8,vers=2.0
mount.cifs kernel mount options: ip=192.168.50.1,unc=\\192.168.50.1\ac68u,iocharset=utf8,vers=2.0,user=admin,pass=********
mount: (hint) your fstab has been modified, but systemd still uses
the old version; use 'systemctl daemon-reload' to reload.
jin:~:#挂载后会在armbain的
/mnt/ac68u/路径下看到挂载的文件目录了。
5.开机自动挂载。在 /etc/fstab 文件中添加自动挂载内容: 注意加上nofail,防止找不到远程目录挂载时启动不了系统//192.168.50.1/ac68u /mnt/ac68u cifs rw, nofail,dir_mode=0777,file_mode=0777,username=admin,password=jw123456,iocharset=utf8,vers=2.0 0 0
- ac68u :主路由硬盘里的分享挂载点。
- /mnt/ac68u:代表本设备要挂载到的路径。
- cifs:是指使用cifs协议实现文件共享服务。
iocharset=utf8:指定字符编码,确保文件名正确显示。- vers=2.0 支持2.0或3.0协议版本
0 0:挂载选项,表示不执行检查和同步。
完成编辑后,运行
sudo mount -a |
参考文章:玩客云刷armbian后通过cifs网络挂载NAS或者路由器的共享文件夹
ubuntu下 rc.local的脚本不运行
debian 挂载 SMB 网络磁盘 - 心底的河流
安装beck-8/subs-check
- 创建
docker-compose.yml文件。beck8/subs-check - Docker - 利用nano打开上面创建的文件,鼠标右键菜单粘贴以下内容。
# 实际路径: /home/subs-check/config |
【ctrl+o】保存,【ctrl+x】退出。
创建docker容器:
docker compose up -d你可以通过
https://你设备的IP:8199/WebUI 编辑你的config.yaml,参考文档:config.yaml通过 cmliu/SubsCheck-Win-GUI面板)编辑 config.yaml文件的注意事项:
Github Proxy:可以在下拉菜单中随便选择一个;
Clash订阅覆写配置文件:只能选择–【[内置]ACL4SSR_Online_Full】
一定要勾选上【启用WebUI API密钥】,密码填
docker-compose.yml文件【- API_KEY=】等于号后面的内容。执行时间:crontab 表达式,在线crontab 解析验证:如:1 11 * * * ,该任务会在 每天上午11:01 自动执行。
第1位(分钟):1→ 每小时的第1分钟
第2位(小时):11→ 每天的第11小时(即上午11点)
第3位(日):*→ 每天
第4位(月):*→ 每月
第5位(星期):*→ 每周的每一天
如需每月1号执行,可修改为1 11 1 * *
手动安装:代码如下:
root@uefi-x86:/mnt/subcheck# chmod +x /mnt/subcheck/subs-check |
- 管理和订阅:
管理:http://192.168.50.14:8199 |
参考教程,视频教程
安装drpyS搭建
这是一个nodejs作为服务端的drpy实现。全面升级异步写法的项目。
大部分node项目均可参考如下做法
项目信息
- 项目地址: drpy-node
- node: v18 以上
- 运行稍候报错puppeteer, 不影响使用
1Panel面板操作
克隆项目
# 创建文件存放目录 -p 创建路径下所有不存在的文件夹
B860:~:# mkdir -p /b860/drpyS
# 安装git
B860:~:# apt-get install git
正在读取软件包列表... 完成
您希望继续执行吗? [Y/n] y
正在处理用于 man-db (2.11.2-2) 的触发器 ...
B860:~:# cd /B860/drpyS/
# 拉取 drpy-node项目
B860:drpyS:# git clone https://github.com/hjdhnx/drpy-node.git
正克隆到 'drpy-node'...
处理 delta 中: 100% (2829/2829), 完成.
处理 delta 中: 100% (2829/2829), 完成.
# cd 到项目文件夹下
B860:drpyS:# cd "/B860/drpyS/drpy-node/"
# pwd查看 项目存放路径
B860:drpy-node:# pwd
/B860/drpyS/drpy-node
B860:drpy-node:#创建node运行环境
- 打开1Panel面板选择【网站】——》【运行环境】——》选择第一排的【Node.js】,点击第二排的【创建运行环境】。
- 在弹出的创建运行环境页面中填写的内容:
- 名称: drpyS # 这个自己随便填;
- 应用:Node.js 版本选择高于20的就行;
- 项目目录:上面
pwd返回的路径:/B860/drpyS/drpy-node; - 启动命令:
node index.js自定义启动命令:开启 - 容器名称:drpyS # 自动创建容器时的容器名称
- 包管理器:npm
- 镜像源:
淘宝[https://registry.npmmirror.com] - 选项卡【端口】-》【添加】: 外部映射端口:5757; 应用端口:5757
- 确认无误后点击【确定】
- 这个创建的时间比较长,等半个小时再看。
- 上面node运行环境创建完成之后在【1Panel面板】——》【容器】会看到一个名为:drpyS的容器已经启动。
更新项目
# 手动更新项目
[1]进入项目目录([可选]自己确认目录, 如果已经在目录下可忽略)
cd drpy-node
[2]更新代码(网络不佳自己使用代理, 优先使用普通拉取提示文件冲突再使用强制拉取)
[2.1]普通拉取
git pull
[2.2]强制拉取
git fetch --all && git reset --hard origin/main
[3]更新依赖(自己确认容器名)
docker exec -it drpyS npm install
[3]重启服务(自己确认编排文件路径和编排版本docker-compose[可能是docker compose])
docker-compose -f /opt/1panel/runtime/node/drpyS/docker-compose.yml restart定时更新项目
打开1Panel面板选择【计划任务】——》第一排【计划任务】——》第二排【创建计划任务】;
在打开的页面中:
任务类型: Shell 脚本;
任务名称: drpyS定时更新 # 这个随便取;
执行周期: 每周 ;每天;这个随便; 周一;11时30分更新;
在容器中执行(无需再输入进入容器命令):这个不勾选,(重要:不需要容器环境,在宿主机上执行);
脚本内容:如下:
# 注意: 使用 git 强制更新(如果自定义过一些参数或文件将被覆盖)
# 注意: 自己确认项目目录 以及 node容器名
cd /B860/drpyS/drpy-node # 注意此行对应项目路径
git fetch --all && git reset --hard origin/main
# 注意此行drpyS对应容器名
docker exec -it drpyS npm install > /dev/null 2>&1
# docker-compose.yml文件路径
# 注意此行对应编排文件路径 和 编排版本docker-compose[可能是docker compose])
docker compose -f /opt/1panel/runtime/node/drpyS/docker-compose.yml restart
armbian系统备份
主要是使用 armbian-ddbr 命令进行备份和恢复
# 备份eMMC |